Lectures
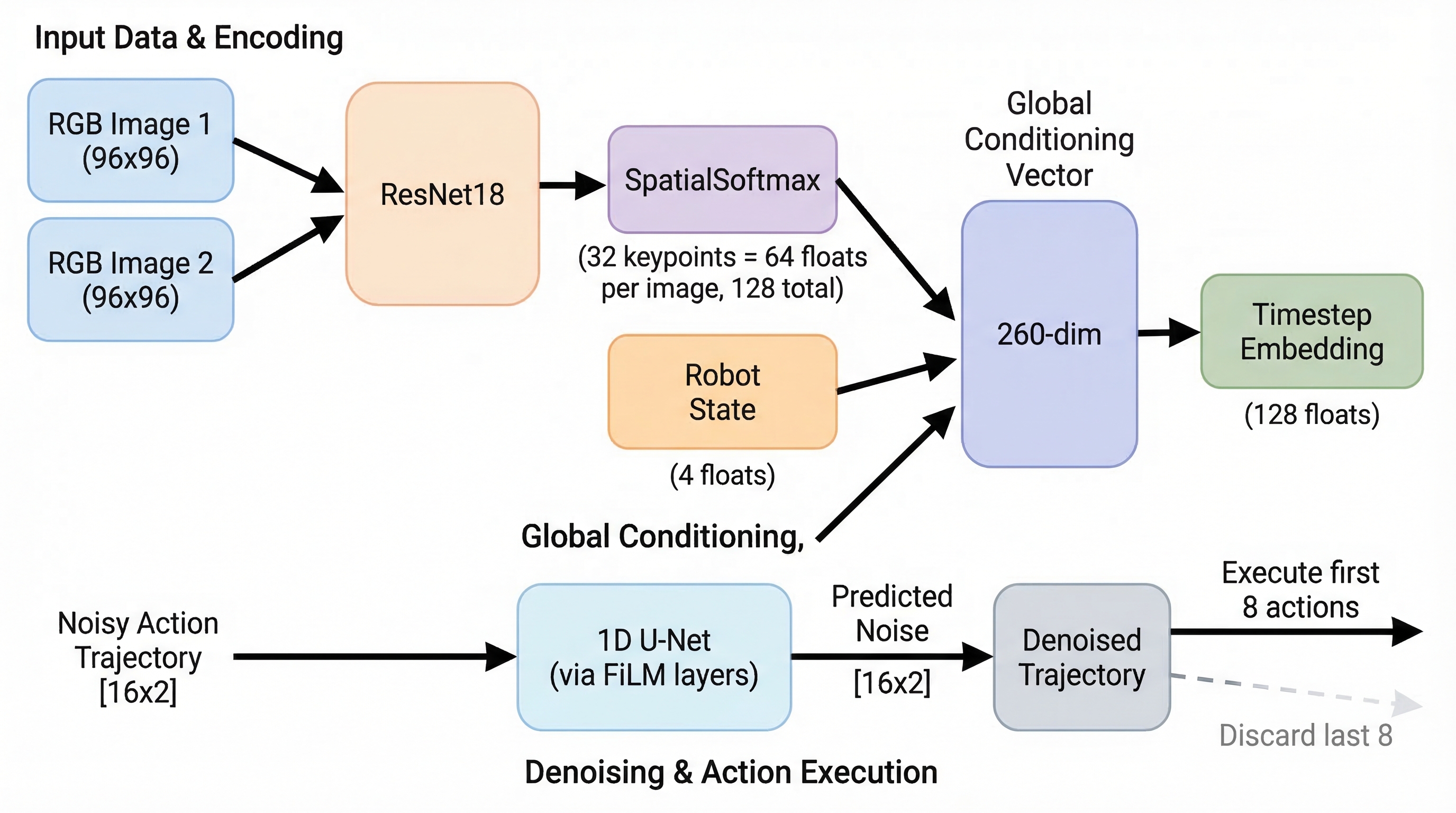
Diffusion Policy
Visuo-motor policy learning via action diffusion. Lecture slides, 4 hands-on Colab notebooks, 7 component deep-dives, and 3 interactive visualizers.
Open lecture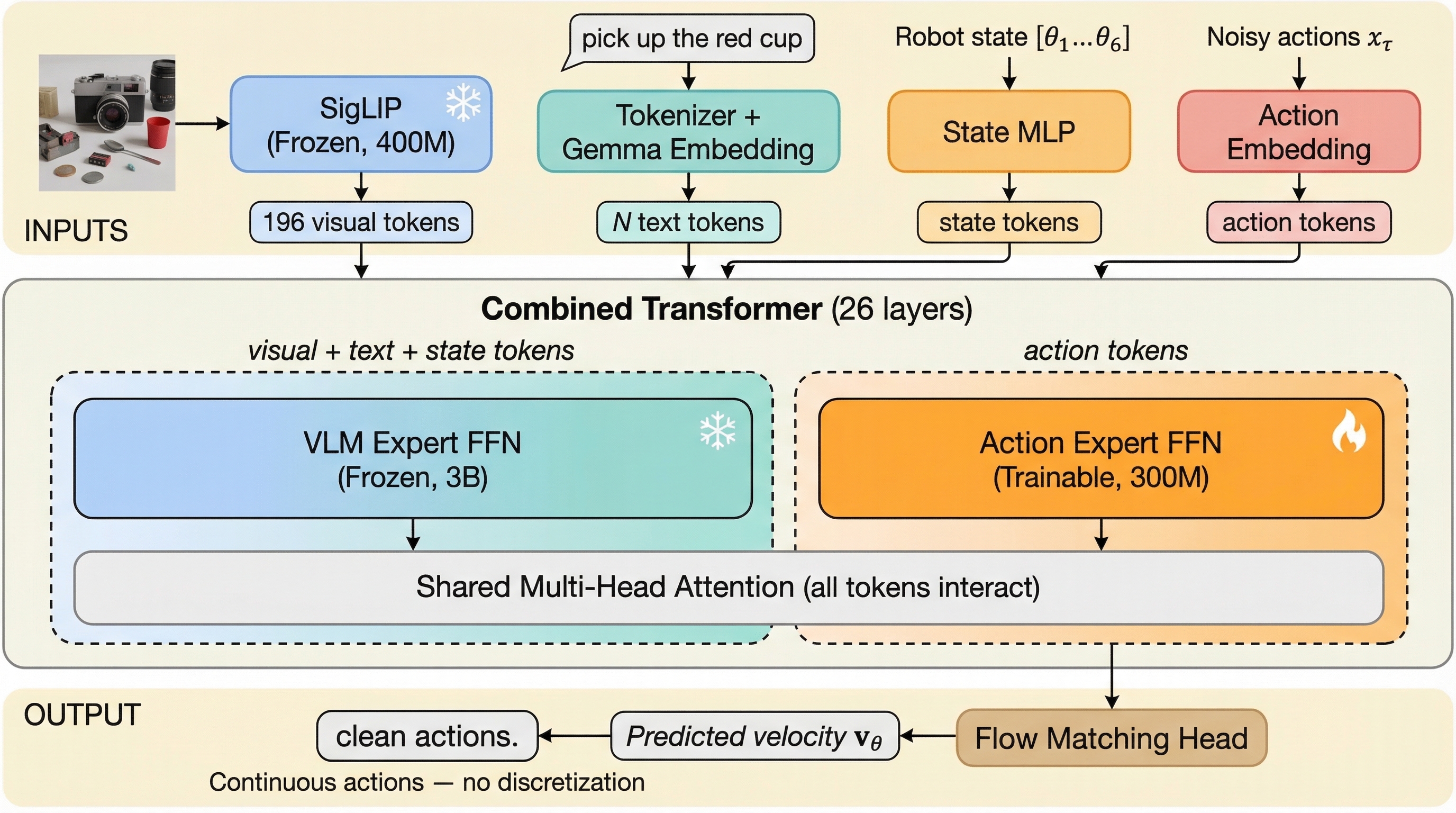
Vision-Language-Action Models
From duct tape to transformers. Trace how images, language, and actions fuse inside a VLA. 5 hands-on notebooks, 8 component animations, and 7 interactive visualizers.
Open lecture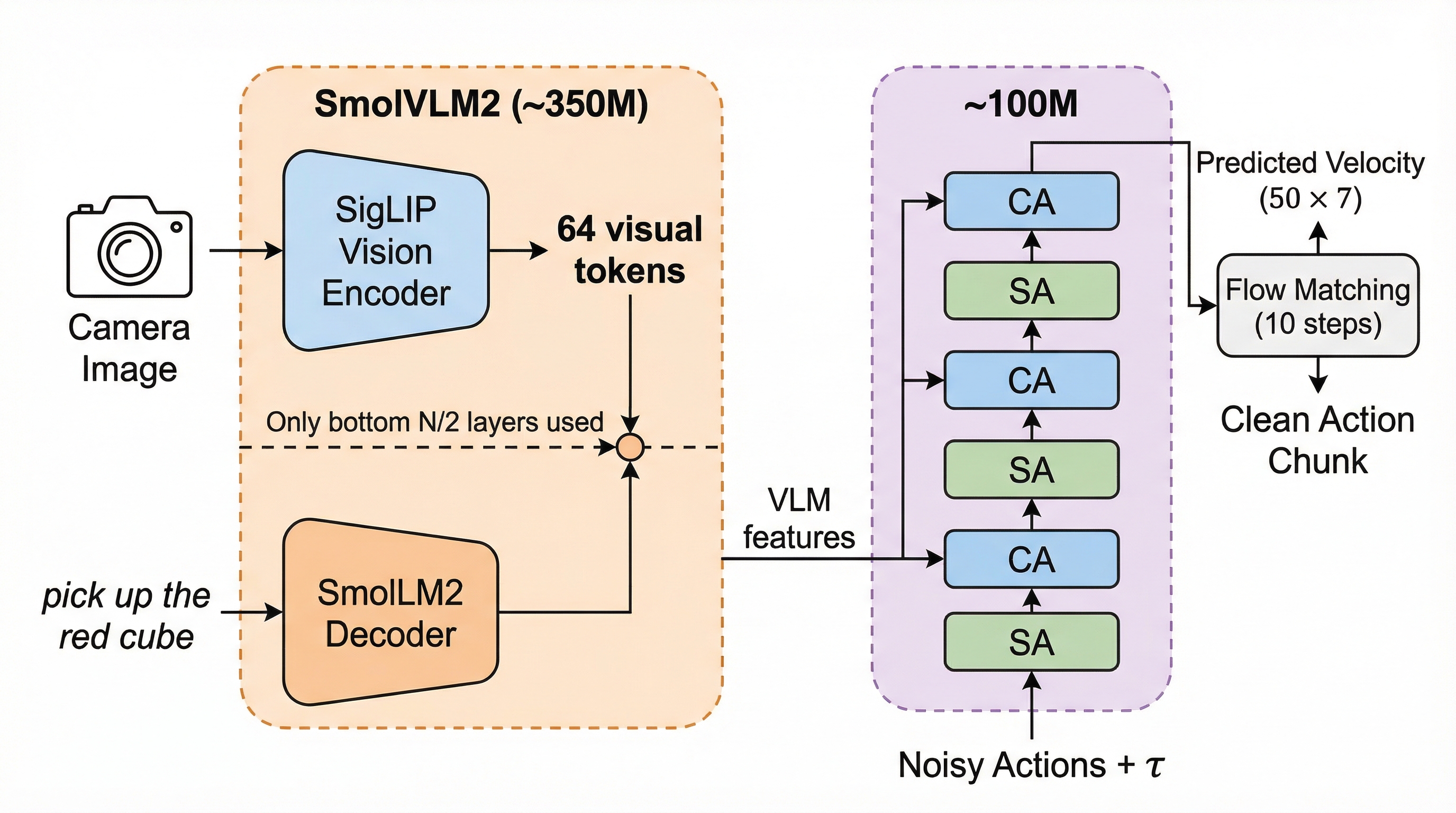
From VLAs to Real Robots
SmolVLA, Flow Matching & SO-101 Deployment. 5 hands-on notebooks, 4 bimanual demo videos, and a complete deployment pipeline from architecture to hardware.
Open lecture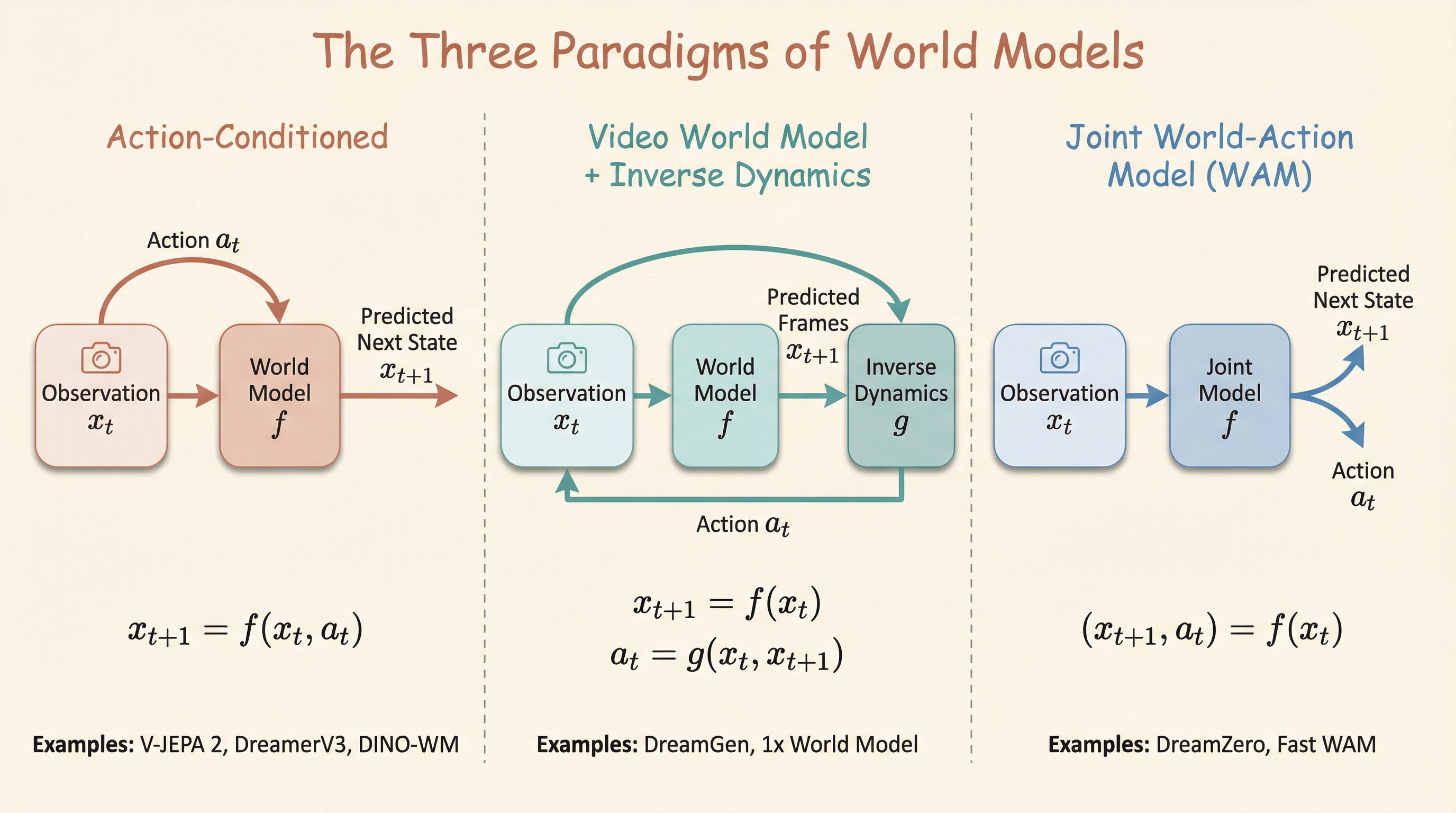
World Models
Teaching robots to imagine. Build IRIS, DINO-WM, and DIAMOND world models from scratch, then scale to real robots with LeWorld and DreamZero. 4 hands-on notebooks and 2 interactive visualizers.
Open lecture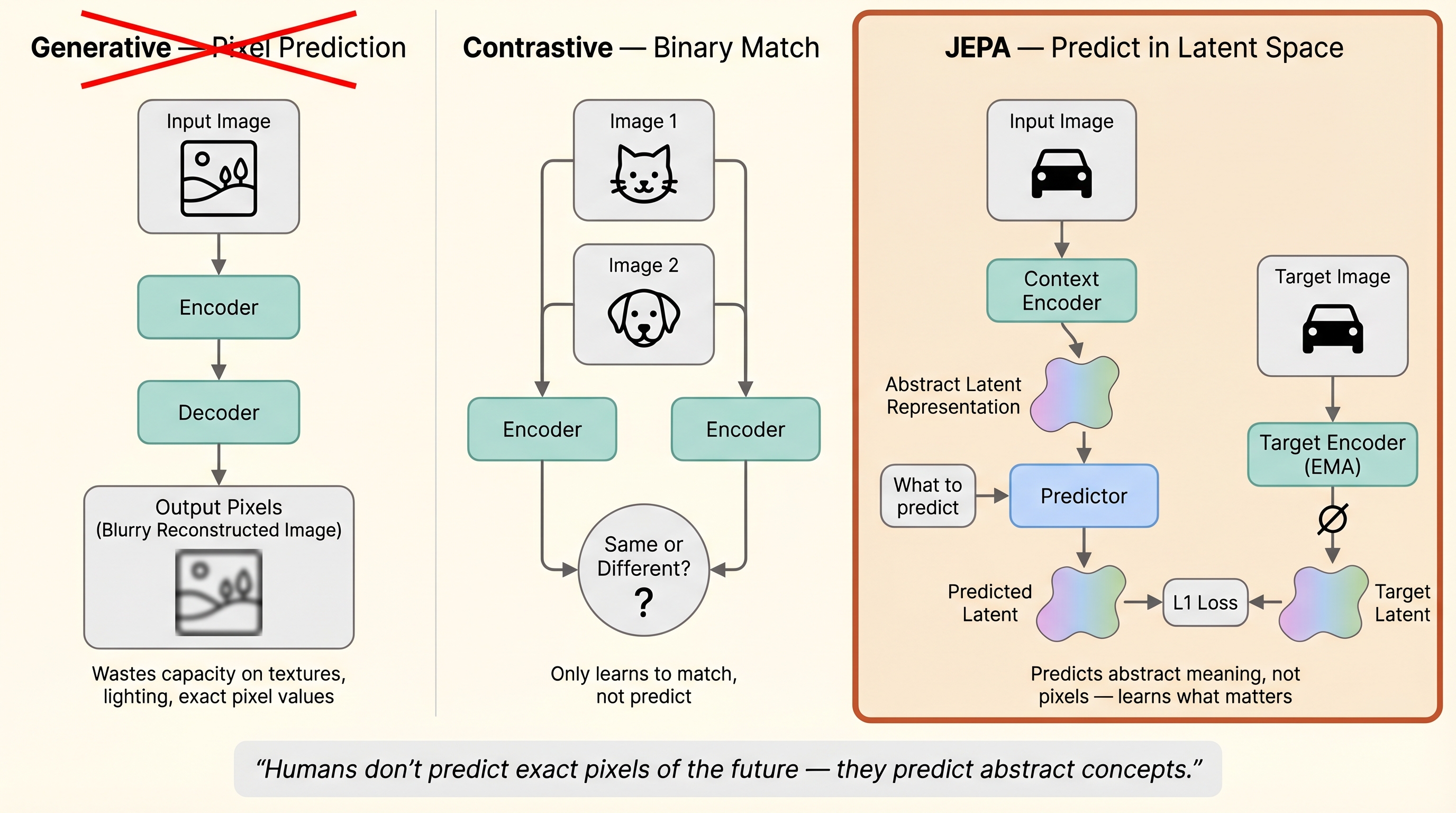
JEPA & V-JEPA 2
LeCun's vision for autonomous intelligence. From JEPA foundations to V-JEPA 2 at 1B scale, and LeWorld's tiny end-to-end JEPA for real robot deployment.
Open lecture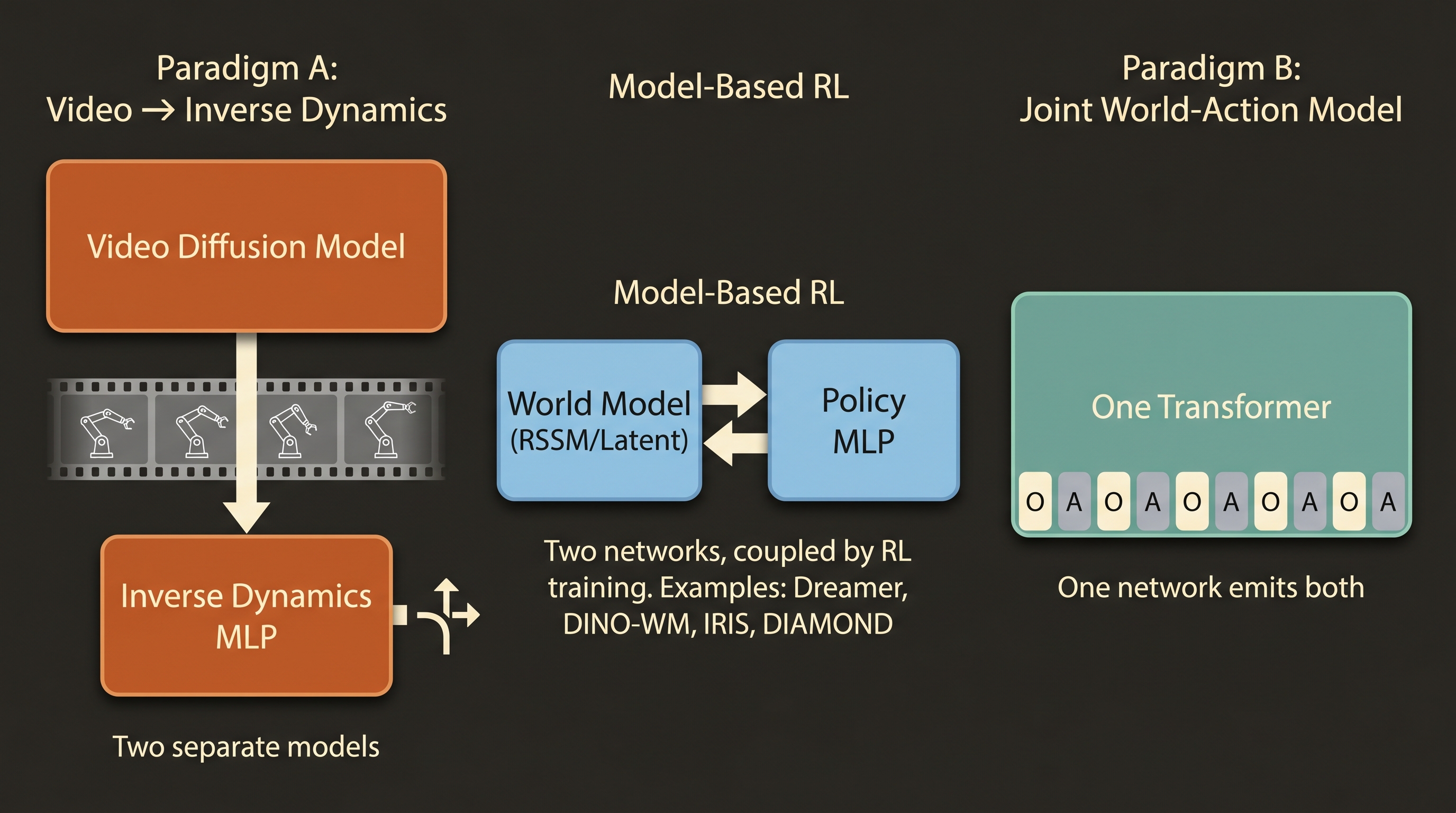
Two Paradigms of World Models
Video-first vs. joint world-action models. Trace the arc from UniPi, SuSIE, HiP, and GR-1 to NVIDIA Cosmos and DreamZero — then fine-tune DreamZero for the SO-101 arm on 4×H100.
Open lecture